Localization
Urban Location Recognition on Mobile Device
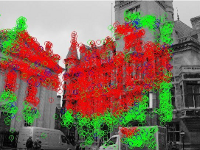
We address the problem of large scale place-of-interest recognition in cell phone images of urban scenarios.
Localization
Camera Pose Voting for Large-Scale Image-Based Localization
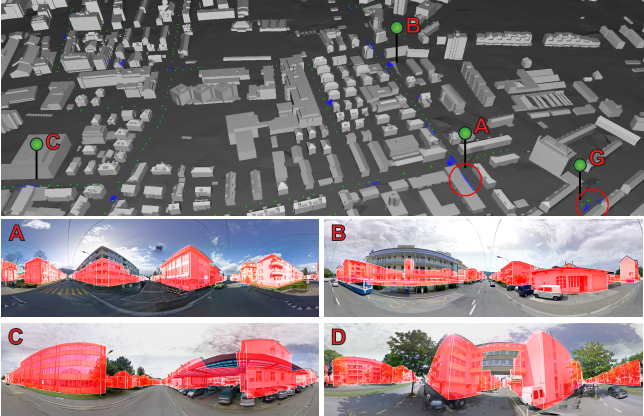
Image-based localization approaches aim to determine the camera pose from which an image was taken.
3D Reconstruction
A Symmetry Prior for Convex Variational 3D Reconstruction
We propose a novel prior for variational 3D reconstruction that favors symmetric solutions when dealing with noisy or incomplete data.

3D Reconstruction
Semantic 3D Modeling
In semantic 3D modeling the goal is to find a dense geometric model from images and at the same time also infer the semantic classes of the individual parts of the reconstructed model.

3D Reconstruction
PlaneSweepLib
PlaneSweepLib (PSL) is a library that implements the plane sweeping stereo matching algorithm. It is written in C++/CUDA by Christian Häne.
3D Reconstruction
Distortion in Multiple View Geometry
Multiple view geometry is well-understood for the case of ideal pinhole cameras and many algorithms exist to estimate epipolar geometry, trifocal tensors or homographies.
3D Reconstruction
Geometric Change Detection
We present an algorithm to detect changes in the geometry of an urban environment using some images observing its current state.

3D Reconstruction
3D Modeling on the Go
We propose a new approach for structure from motion, where symmetry relations in the 3D structure are automatically recovered from multiple images and then imposed within a new constrained bundle adjustment formulation that incorporates robust priors on the expected model shape.
3D Reconstruction
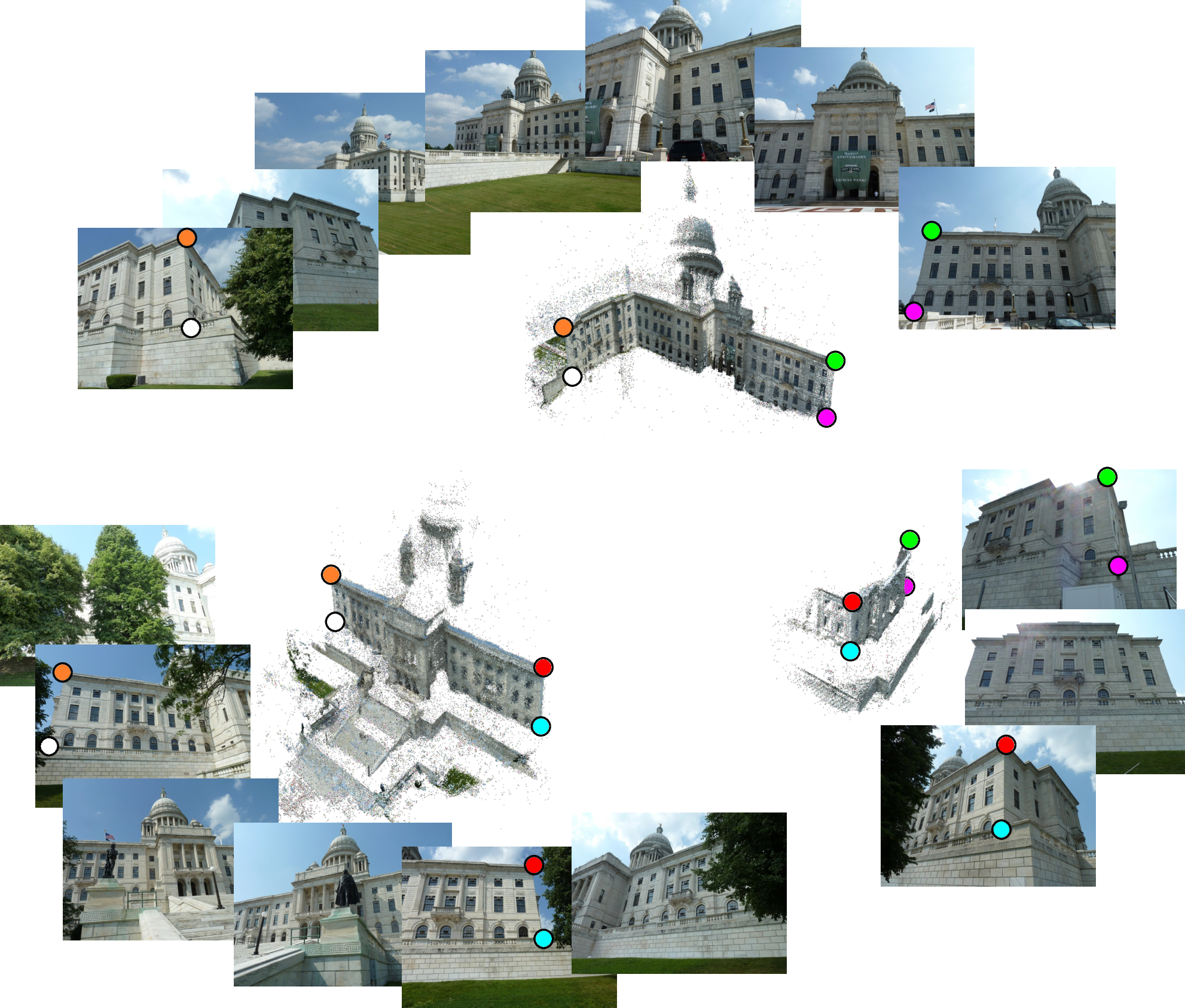
Merging the Unmatchable: Stitching Visually Disconnected SfM Models
Recent advances in Structure-from-Motion not only enable the reconstruction of large scale scenes, but are also able to detect ambiguous structures caused by repeating elements that might result in incorrect reconstructions.

3D Reconstruction
Indoor-Outdoor 3D Reconstruction Alignment
Structure-from-Motion can achieve accurate reconstructions of urban scenes. However, reconstructing the inside and the outside of a building into a single model is very challenging due to the lack of visual overlap and the change of lighting conditions between the two scenes.
3D Reconstruction
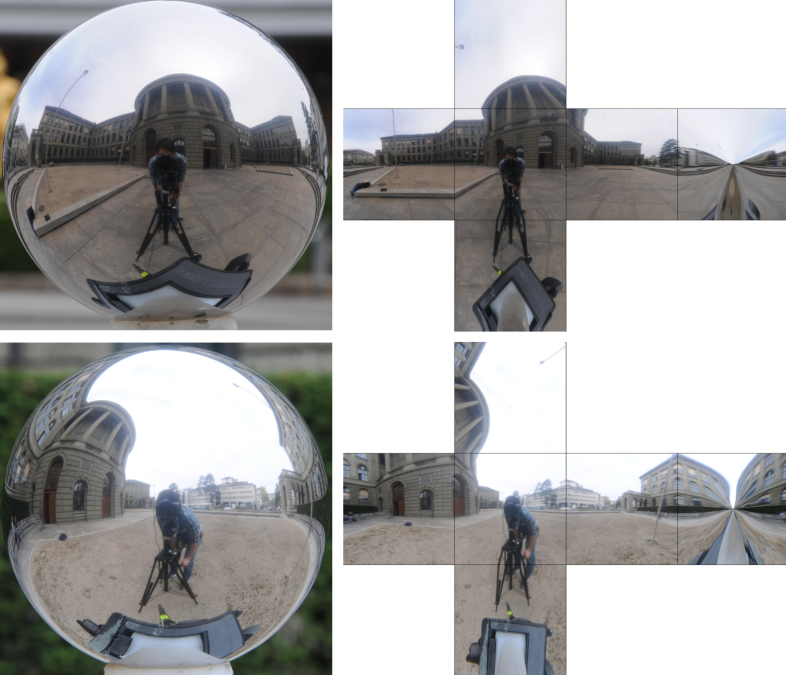
Non-Parametric Structure-Based Calibration of Radially Symmetric Cameras
We propose a novel two-step method for estimating the intrinsic and extrinsic calibration of any radially symmetric camera, including non-central systems.

3D Reconstruction
Privacy Preserving Structure-from-Motion
We present the first full Structure-from-Motion pipeline based on privacy preserving line features.
Motion Analysis
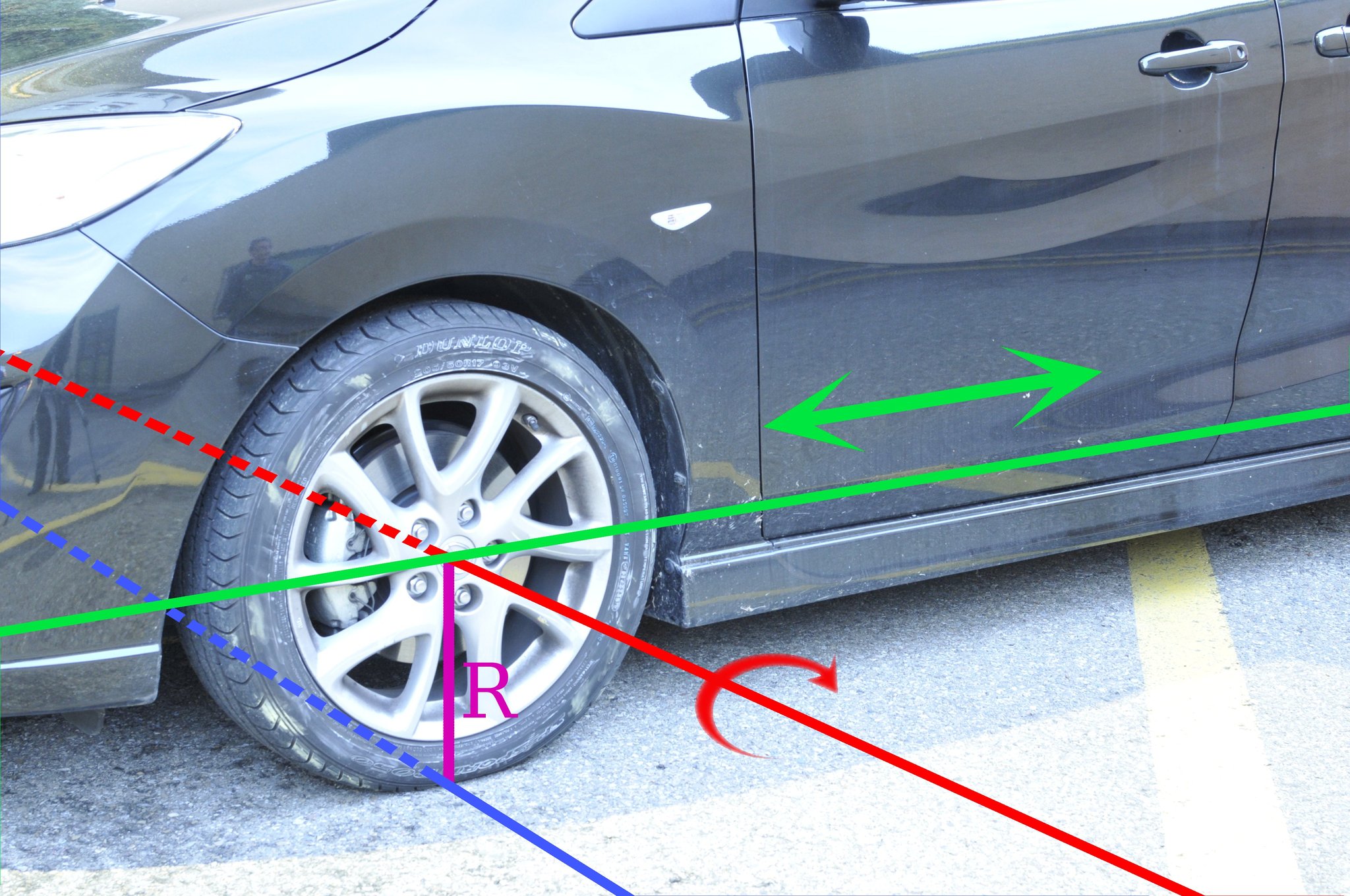
Articulated and Restricted Motion Subspaces and Their Signatures
Articulated objects represent an important class of objects in our everyday environment. Automatic detection of the type of articulated or otherwise restricted motion and extraction of the corresponding motion parameters are therefore of high value, e.g. in order to augment an otherwise static 3D reconstruction with dynamic semantics, such as rotation axes and allowable translation directions for certain rigid parts or objects.
Semantic Labeling
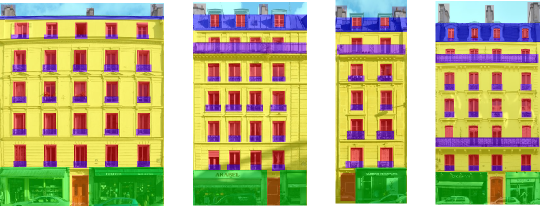
Efficient Structured Parsing of Facades Using Dynamic Programming
We propose a sequential optimization technique for segmenting a rectified image of a facade into semantic categories. Our method retrieves a parsing which respects common architectural constraints and also returns a certificate for global optimality.

Vision for Robotics
V-Charge: Automated Valet Parking and Charging for e-Mobility
The project V-Charge is an EU funded collaborative project which aims for fully autonomous charging and parking of electrical vehicles. It is based on the vision that due to required drastic decrease in CO2 production mobility will undergo important changes.